Jenis Jenis Drone, Istilah, Bagian, Prinsip Dasar Dan Gerakannya – Apa saja jenis jenis drone dan fungsinya ?, Pada kesempatan ini Seputarpengetahuan.co.id akan membahasnya dan tentunya hal-hal lain yang juga melingkupinya.Mari kita simak bersama pembahasannya pada artikel di bawah ini untuk lebih dapat memahaminya.
Jenis Jenis Drone, Istilah, Bagian, Prinsip Dasar Dan Gerakannya
Unmanned Aerial Vehicle (UAV) atau yang biasa disebut Drone adalah merupakan pesawat tanpa awak yang mampu terbang baik secara kontrol manual maupun otomatis. Drone dikendalikan secara otomatis melalui program komputer, atau melalui kendali jarak jauh. Drone terbang dengan menggunakan hukum aerodinamika untuk mengangkat dirinya baik tanpa muatan maupun dengan membawa muatan.
Seiring zaman, drone banyak digunakan oleh berbagai kalangan baik kebutuhan pengambilan gambar maupun untuk kebutuhan pekerjaan.Beberapa kegunaannya yakni seperti untuk vlog, video travelling, dan lain sebagainya. Berikut ini ada beberapa penjelasan mengenai istilah umum, fungsi, jenis-jenis drone dan bagian dari drone.
Pada awalnya drone atau Unmanned Aerial Vehicle (UAV), dikembangkan untuk kebutuhan militer. Namun seiring dengan perkembangan teknologi drone dengan berbagai variasi perangkat dan ukuran maka penggunaan drone saat ini telah meluas ke berbagai bidang, seperti dalam bidang fotografi, pertanian, keamanan, pendidikan (riset dasar), dan lain-lain.
Sejarah penggunaan drone pertama kali pada saat perang dunia ke II, pada tanggal 22 Agustus 1849, yaitu saat Austria menyerang salah satu kota Venice di Itali menggunakan balon yang tidak berawak dan dilengkapi dengan bahan peledak.
Pada tanggal 12 September 1916, sebuah sebuah bom yang dapat terbang dikenal dengan Hewitt-Sperry Automatic Airplane. Penggunaan radio kontrol pada pesawat tanpa pilot pertama kali dikembangkan di Inggris pada tahun 1931, yaitu Fairey Queen radio kontrol yang berasal dari Fairey IIIF.
Istilah Umum Drone
Berikut adalah istilah umum dari drone :
- Drone/ UAV: Unmanned Aerial Vechicle merupakan pesawat tanpa awak yang dikendalikan oleh remote control.
- Multirotor: Merupakan rotor/dinamo sebagai penggerak drone yang jumlahnya lebih dari satu.
- GPS: Sistem navigasi satelit yang digunakan untuk menunjukkan posisi dari alat yang dipakai, dan jumalah nya ribuan tergantung dari kegunaan alat tersebut.
- GLONASS: Global Navigation Satellite System ini hampir sama seperti GPS yaitu sistem navigasi satelit yang digunakan untuk mendeteksi posisi dari alat tersebut.
- IMU: Inertial Measurement Unit merupakan komponen utama dari drone yaitu alat yang didalamnya terdapat accelerometers dan gyroscopes digunakan untuk mengukur dan menginformasikan kuat lemahnya medan magnet serta mengatur kestabilan posisi drone.
- CALIBRASI COMPAS: Kalibrasi kompas ini sebagai prosedur safety dari setiap drone yang bertujuan untuk memastikan posisi drone dengan benar, agar dapat menyamakan pergerakan rc dan dapat menjalankan perintah dengan benar.
- SATELIT: Jumlah satelit yang dapat dilihat di device pengotrol yang jumlahnya sebagai petunjuk satelit yang melakukan penguncian pada drone yang terhubung GPS.
- RTH: Return to Home yaitu feature pada drone yang berguna untuk mengatur drone yang telah di setting agar dapat kembali ke pangkalan atau HOME.
- PILOT DRONE: Orang yang menjalankan drone dari jarak jauh menggunakan alat kendali.
- SAFETY PROSEDUR: Pada saat mengendalikan drone, kita harus selalu mengutamakan keamanan drone yaitu dengan mengikuti langkah-langkah safety prosedur.
- FPV (Firs Person Drone): Sudut pandang kamera yang digunakan untuk mengatur arah sesuai dengan keinginan.
- RTF (Ready to Fly): Posisi yang menunjukkan kesiapan drone untuk diterbangkan.
- ESC (Electronic Speed Controller): Sistem untuk mengatur cepat lambat drone pada posisi di udara.
- FC (Flight Controller): Alat yang digunakan untuk mengontrol drone agar sesuai dengan perintah.
- VPS (Vision Positioning System): adalah sistem yang memberikan informasi dan mengatur ketinggian dari posisi drone.
- FPV (First Person View}: Sudut pandang pertama sebagai pilot yang menerbangkan drone dan biasanya feature ini berbentuk kaca mata khusus yang digunakan untuk melihat langsung.
Bagian dan Komponen Drone
-
Flight Controller
Flight controller adalah sebuah mikrokontroler yang memiliki kompleksitas fungsi dalam kontrol quadcopter. Fungsi dari flight controller ini yaitu untuk mengatur kecepatan motor, stabilisasi drone dan mempertahankan ketinggian. Selain itu flight controller menerima semua perintah atau inputan dari pilot.
Dalam flight controller sudah tertanam komponen pendukung seperti sensor GPS, compas dan lain-lain, fungsi utama flight controller yaitu mengendalikan semua pergerakan mulai dari yaw, roll, pitch, altitude dan lainnya. seperti pada penelitian ini penulis menggunakan flight controller dengan Pixhawk Flight Controller.
- Motor
Motor ialah komponen utama untuk penggerak quadcopter, karena dengan putaran motor ini quadcopter dapat terbang. Pemilihan motor harus disesuaikan dengan kebutuhan karena beda jenis motor beda fungsi yang dihasilkan motor tersebut. Motor pada quadcopter menggunakan KV= RPM/Volt, ukuran KV berbanding lurus dengan kecepatan putaran motor (RPM).
Jika nilai KV rendah makan RPM yang dihasilkan rendah serta untuk torsi atau daya angkat (Throttle) yang besar dan begitupun sebaliknya. Lilitan pada rotor menentukan jumlah torsi yang dihasilkan, apabila semakin banyak lilitan pada rotor maka torsi semakin besar dan untuk RPM kecil begitupun sebaliknya.
- Propeller
Propeller diibaratkan baling baling untuk dapat terbang quadcopter pun demikian, akan tetapi termasuk rotary wing atau sayap putar. Cara kerja dari alat ini yaitu mengubah putaran menjadi gaya dorong untuk bergerak. Terdapat 2 jenis propeller yang diibagi berdasarkan arah putaran dan arah hembusan udara yaitu Clockwise (CW) dan Counter Clockwise (CCW). Dan material yang digunakan berbagai macam mulai dari plastik, karbon, kayu dan lain-lain.
- Electronic Speed Controller
ESC adalah sebuah device yang fungsinya sebagai driver motor brushless yang di mana mengatur kecepatan dan arah putaran. Selain itu tugas ESC yaitu mengubah tegangan DC ke AC 3 fasa untuk dilanjutkan ke motor. ESC ini terhubung langsung ke battery dan ke flight controller melalui kabel yang terdiri dari signal dan ground, dan komponen ini sangat penting untuk motor agar tidak terjadi kerusakan.
Jenis dan besaran ampere pada ESC ini bermacam-macam, paling rendah diimulai dari 12 A sampai ratusan Ampere tergantung dari kebutuhan. Biasanya menyesuaikan besaran motor yang dipakai. Tipe ESC di antaranya ada dua, pertama ESC opto di mana tidak mempunyai output tegangan 5v sebagai tambahan, dan terakhir ESC UBEC di mana ESC ini memiliki output tegangan sebesar 5v dan bias digunakan sebagai power source.
- Frame
Frame yaitu bagian rangka atau tubuh pada quadcopter yang menjadi tulang atau penyokong semua komponen quadcopter serta tempat ditempelnya semua komponen-komponen sehingga dengan adanya frame ini komponen dapat terintegrasi dengan baik.
- Battery
Battery merupakan sumber daya utama untuk quadcopter, sehingga penggunaan battery ini harus cocok dan sesuai dengan kebutuhan, dengan melalui analisis dan perhitungan yang sudah dilakukan sebelumnya. Agar didapat hasil yang optimal saat terbang dengan memperoleh waktu terbang maksimal. Jenis yang digunakan yaitu jenis LiPo atau lithium polymer.
- Radio Transmitter dan Reciever
Radio Transmitter dan Reciever ialah pengendali quadcopter yang dapat diprogram sesuai kebutuhan. Biasanya telah sepaket dengan remote control (remote kendali).
- Power Distribution Board (PDB)
Power Distribution Board (PDB) berfungsi untuk mendistribusikan daya pada quadcopter dan menyediakan jalur yang lebih rapi untuk menghubungkan baterai dengan ESC.
- Sensor
Merupakan perangkat tambahan pada quadcopter yang digunakan untuk mendeteksi adanya perubahan fisik maupun kimia. Sensor yang sering digunakan adalah anemometer, GPS, barometer, dan lain-lain.
Jenis Drone Berdasarkan Fungsinya
Berikut ada beberapa jenis drone berdasarkan fungsinya:
-
Drone Militer
Drone militer berfungsi untuk kepentingan di bidang militer. Adapun Jenis Drone Militer yang populer adalah UAV Predator dan Reaper.
Di Indonesia ada beberapa jenis drone militer yaitu Puna Gagak, Puna Pelatuk, Puna Walung, dan lain sebagainya.
- Drone Konsumer
Drone Konsumer jenis ini biasanya sering digunakan oleh para pengguna yang memiliki hobi memotret dan membuat video.
Fungsi dari drone konsumer tidak lain yakni untuk menyalurkan hobi penggunanya. Oleh karena itu, pada drone ini dilengkapi fitur kamera beresolusi tinggi.
Drone Konsumer yang biasa digunakan seperti DJI Mavic Pro, GoPro Karma, dan DJI Phantom.
-
Drone Mainan
Drone jenis mainan ini biasanya tidak memiliki kamera pada perangkatnya, karena drone ini hanya berfungsi sebagai mainan saja.
Drone ini pula yang biasanya digunakan oleh pilot pemula untuk kegiatan berlatih simulasi menjalankan pesawat.
-
Drone Profesional
Drone Profesional biasanya digunakan penggunanya untuk alat produksi sebuah project atau video.
Drone profesional hampir sama seperti drone konsumer, hanya saja perbedaannya pada drone profesional kualitas kamera lebih baik dibandingkan kualitas kamera drone konsumen.
-
Drone Industrial
Drone Industrial adalah lanjutan dari Drone Profesional dan memiliki baling-baling cukup banyak, biasanya disebut sebagai konfigurasi multirotor.
Drone ini biasa digunakan pada industri film besar di bidang pertanian, dan digunakan untuk membantu menyiram pupuk pada tanaman serta menyemprotkan pestisida pada tanaman.
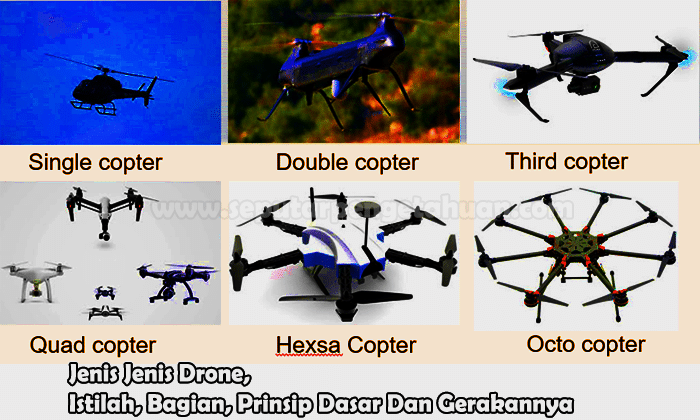
Jenis Drone Berdasarkan Jumlah Rotor
Berdasarkan jumlah rotor yang digunakan, drone dapat dikelompokkan dalam beberapa jenis. Jumlah rotor akan memengaruhi banyak aspek seperti efisiensi, daya angkat, waktu penerbangan, dan stabilitas. Adapun jenis-jenis drone berdasarkan jumlah rotor yang digunakan adalah sebagai berikut:
-
Bicopter
Bicopter adalah salah satu jenis multirotor dengan jumlah rotor yang digunakan adalah 2 buah dengan tambahan 2 buah motor servo sebagai kontrol gerakan ke depan dan ke belakang secara independen untuk memberikan kontrol pitch dan yaw.
-
Tricopter
Tricopters memiliki desain khusus, desain konfigurasi Y3 sistem kendali pada tricopter yakni dengan mengatur arah motor dengan motor servo dan mengatur kecepatan kedua buah motor tersebut.
-
Quadcopter
Quadcopters umumnya menggunakan dua pasang baling-baling tetap yang identik, yaitu dua searah jarum jam (CW) dan dua berlawanan arah jarum jam (CCW). Quadcopter memiliki 4 mesin yang dipasang pada 4 lengan bingkai simetris sehingga dapat memiliki bentuk + atau X satu. Untuk fotografi, X yang paling sering digunakan karena baling-baling tidak masuk dalam bingkai stabilitas tinggi dan daya tahan yang kuat terhadap benturan.
-
Hexacopter
Hexacopter memiliki 6 mesin pada kerangka simetris dengan 6 lengan ditempatkan pada sudut 60 derajat. Jenis ini multirotor sangat populer karena memiliki daya angkat yang besar kapasitas dan kestabilan yang kuat sekalipun salah satu mesinnya menderita masalah.
-
Octocopter
Octocopter adalah versi perbaikan dari HexaCopter dengan kapasitas angkat yang lebih tinggi dan lebih baik stabilitas. Ini dapat terbang dan mendarat secara teratur bahkan dengan kerusakan dua mesin. Kelemahan dari model ini adalah jumlah arus listrik yang dihisap dari sumber energi dan harga tinggi.
Prinsip Dasar Drone
Drone bekerja bersumber pada energi angkat yang terjadi sebab putaran baling- baling yang digerakkan oleh rotor ataupun motor listrik. Lift ataupun energi angkat umumnya berhubungan dengan sayap dari suatu model airfoil fixed- wing, tetapi lift pula bisa dihasilkan oleh propellers, layang- layang, helikopter, perahu layar apalagi pada wujud dari suatu mobil.
Teori buat menerangkan lift ataupun energi angkat merupakan Prinsip Bernoulli, ialah aliran hawa ialah tenaga yang konstan, kala hawa mengalir pada bagian yang mempunyai tekanan hawa rendah, hingga aliran udara tersebut terus menjadi cepat. Dari Prinsip Bernoulli, tekanan hawa pada bagian atas bergerak lebih kilat dengan demikian tekanan jadi rendah dibanding dengan bagian dasar yang aliran udaranya bergerak lebih lelet. Perbandingan tekanan hawa tersebut menciptakan style aerodinamik.
Pada Hukum Newton tentang Lift and deflection of the flow, lift dihasilkan sebab terdapatnya tekanan hawa serta style tekan dari zona wing, kalau tekanan dari luas wing tidak menciptakan style yang murni, hendak namun diperlukan perbandingan tekanan buat menciptakan lift.
Arah putaran propellers dibagi jadi 2 arah putaran yang berbeda ialah searah duri jam/ Clock Wise( CW) serta bertentangan arah duri jam/ Counter Clockwise( CCW). Motor yang berbalik dengan searah duri jam ataupun ialah Clock Wise( CW) Ialah motor C serta B sebaliknya motor yang berbalik bertentangan arah duri jam ialah motor A serta D. Perbandingan putaran pada tiap motor bertujuan supaya tidak menimbulkan momen putar pada bodi quadopter.
Gerakan Drone
Gerakan dasar pada quadcopter terdiri dari 4 gerakan, ialah; Roll( bergerak menyamping), Pitch( bergerak maju mundur), Yaw( bergerak secara berotasi) serta Throttle( bergerak ke atas landing serta take off). Foto serta uraian dari pergerakan quadcopter merupakan bagaikan berikut:
-
Throttle
Throttle ialah pengangkatan kecepatan secara totalitas pada motor, di mana kala motor full throttle hingga quadcopter hendak terjadi momen angkat pada body quadcopter. serta begitu kebalikannya bila motor merendahkan kecepatan hingga terjadi posisi turun.
-
Pitch
Pitch ialah pergerakan maju serta mundur pada quadcopter, di mana 2 buah motor yang terletak di posisi balik berbalik lebih kilat dibandingkan dengan motor yang terletak di depan sehingga terjadi kemiringan ke arah depan serta hendak terdorong ke depan serta hendak terjalin gerakan maju, demikian juga kebalikannya buat bergerak mundur.
-
Roll
Roll ialah gerakan menyamping, baik ke arah kiri ataupun kanan, buat bisa bergerak menyamping butuh terdapatnya pergantian kecepatan pada satu pasang motor, misal quadcopter hendak gerak ke samping kanan hingga motor sebelah kiri menaikkan kecepatan sehingga terjadi momen miring serta secara tidak langsung bergerak ke samping kanan begitu juga kebalikannya.
-
Yaw
Pergerakan ini ialah di mana quadcopter berbalik dalam satu poros dicoba dengan metode merendahkan kecepatan sejoli motor, atas- bawah ataupun kiri- kanan, serta menaikkan kecepatan satu pendamping motor yang sedikit lelet kecepatannya dibanding pendamping motor yang lain.
Demikianlah ulasan dari Seputarpengetahuan.co.id tentang Jenis Jenis Drone, Istilah, Bagian, Prinsip Dasar Dan Gerakannya , semoga dapat menambah wawasan dan pengetahuan kalian. Terimakasih telah berkunjung dan jangan lupa untuk membaca artikel lainnya
Daftar Isi
